A Control Simulation of Multiple Bubbles
for Representing Desired Shapes
Naruo Nishio 1
Kaisei Sakurai 3
Keiko Nakamoto 1
1Hosei University
2Prometech CG Research
3CyberAgent, Inc.
Abstract
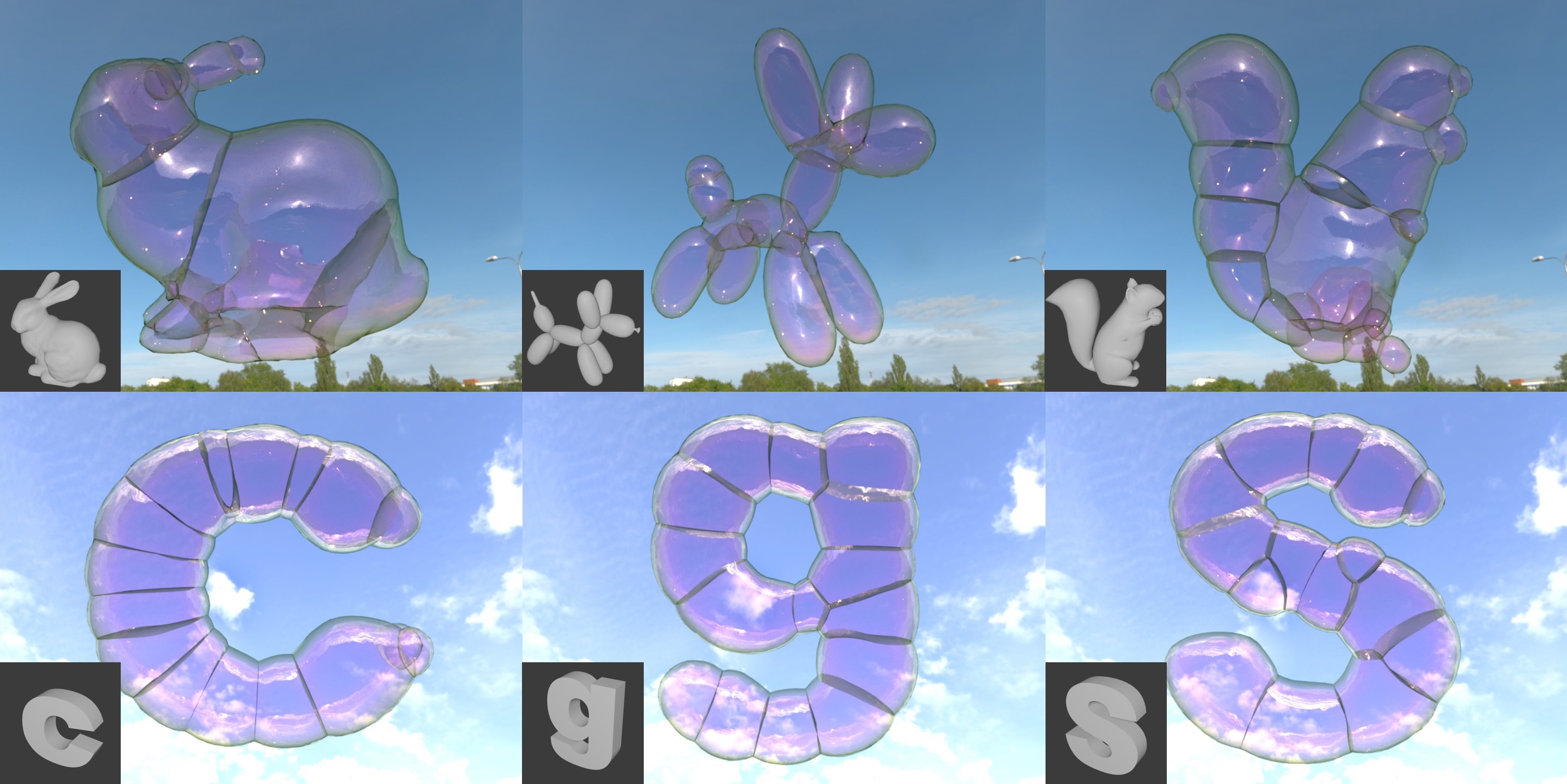
This paper presents a control simulation that represents user-desired shapes using multiple connected soap bubbles. A previous method attempted to control a single soap bubble using external forces. However, due to the strong surface tension making spherical babbles, elongated shapes could not be achieved. To address this issue, this paper aims to develop a control simulation that achieves diverse soap bubble shapes by dividing the target shape into connected soap bubbles. In our approach, we first generate an initial soap bubble configuration composed of multiple bubbles to represent the target shape. Then, by applying external forces to each bubble, we simulate the bubbles to maintain their shape along the target form. We use an implicit-function-like representation for the connected soap bubbles and develop a new polygonizer that makes shapes including the internal faces of bubbles. By demonstrating examples with various target shapes such as objects and text, we show the effectiveness of our proposed control method.
Publication